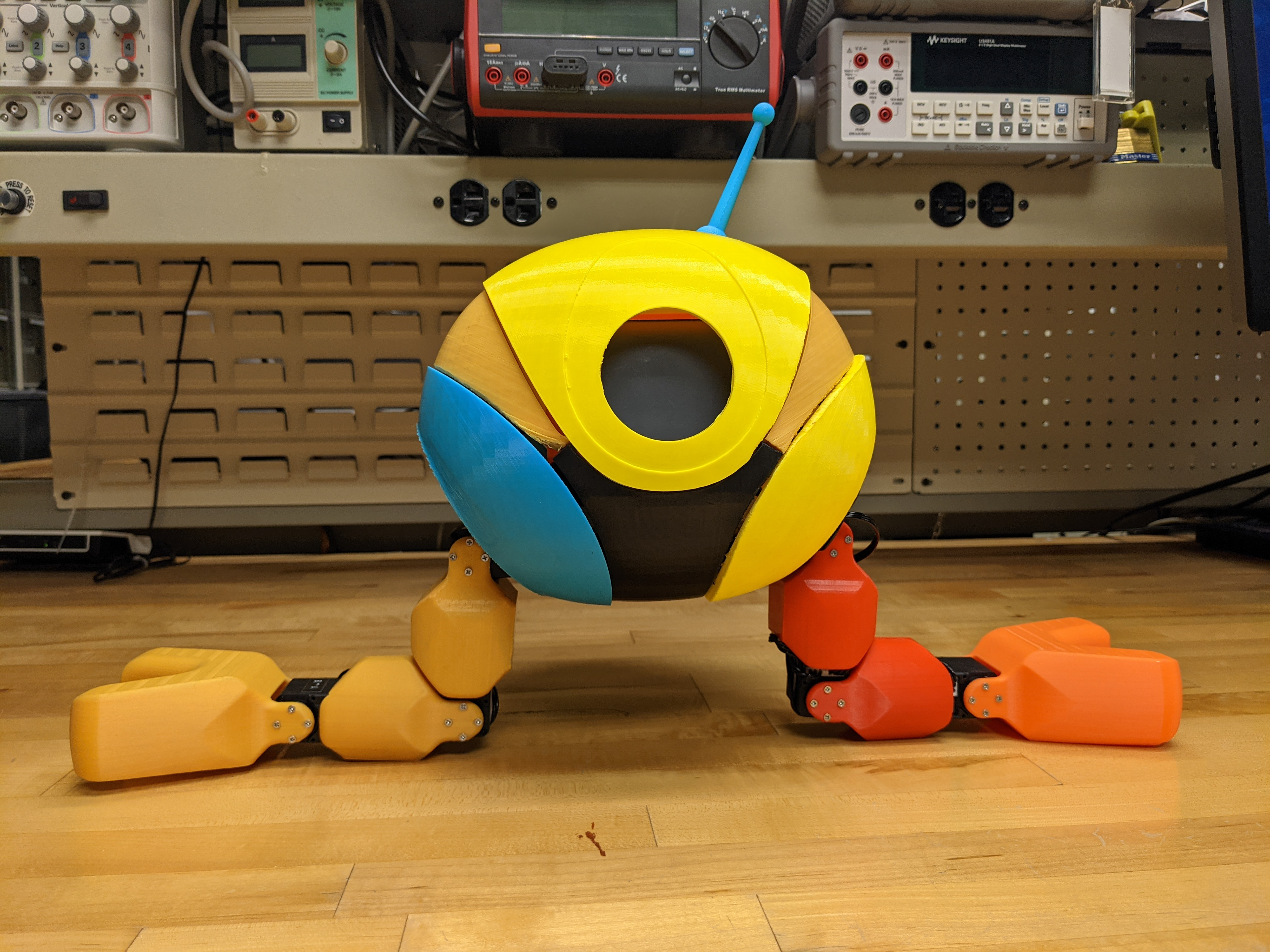
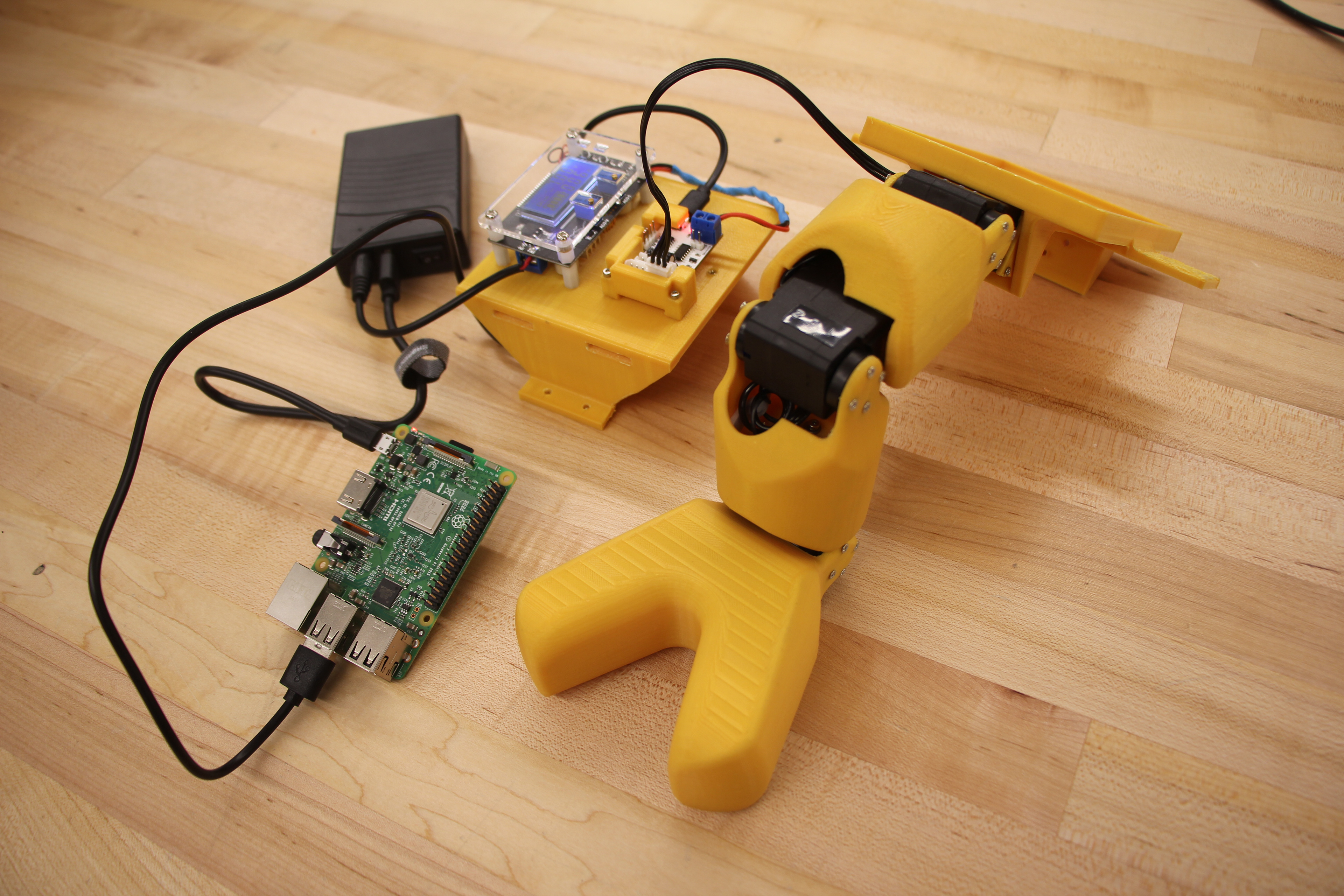
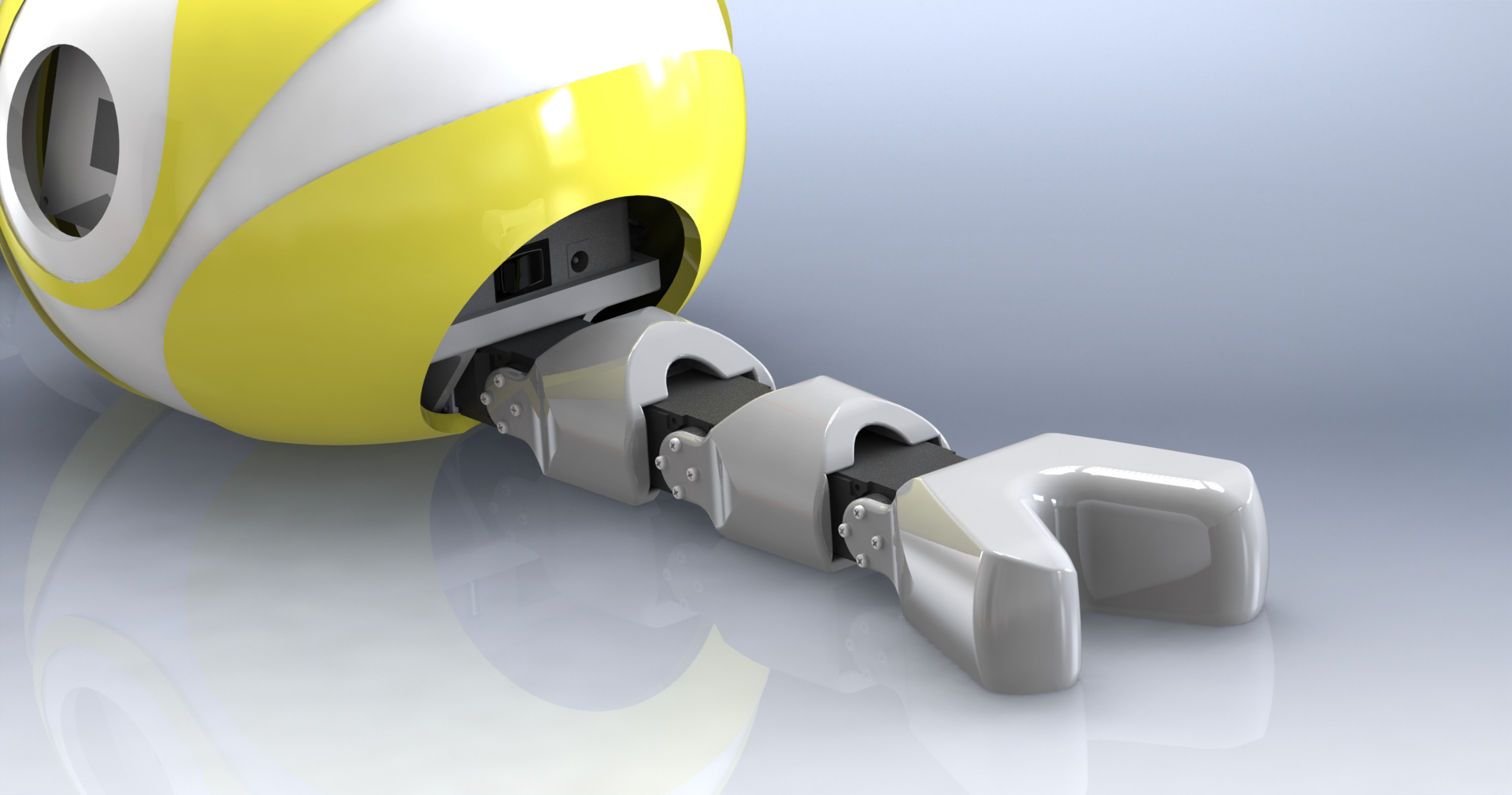
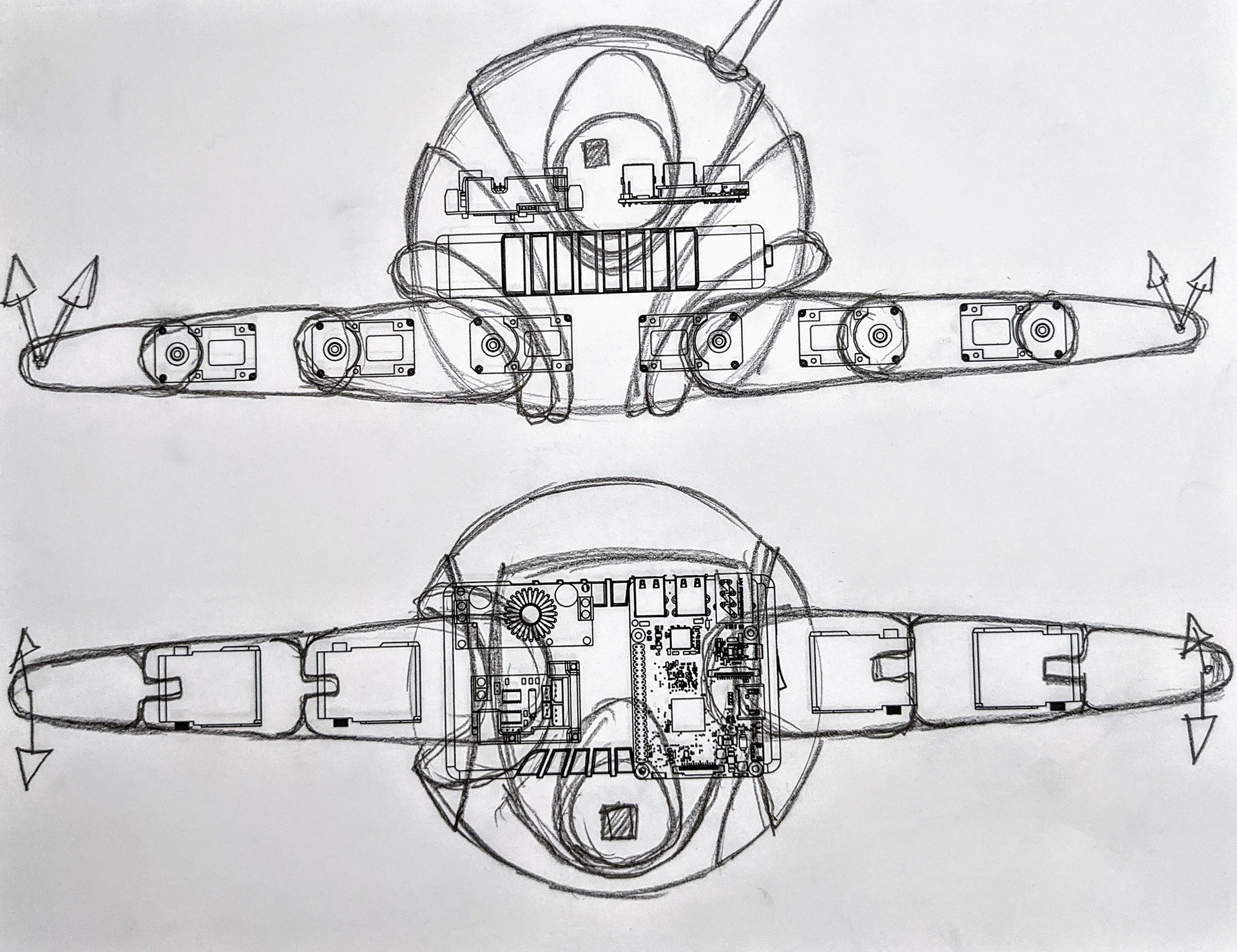
For the Robotics Studio class at Columbia University, my partner and I built a robot that can walk and dance, modeled after KVN from Final Space. We designed it in CAD, 3D printed its components, and assembled them with a Raspberry Pi, six bus servo motors, and an LED screen. We programmed its gait and dance moves in Python using keyframe recording. Our video is below!