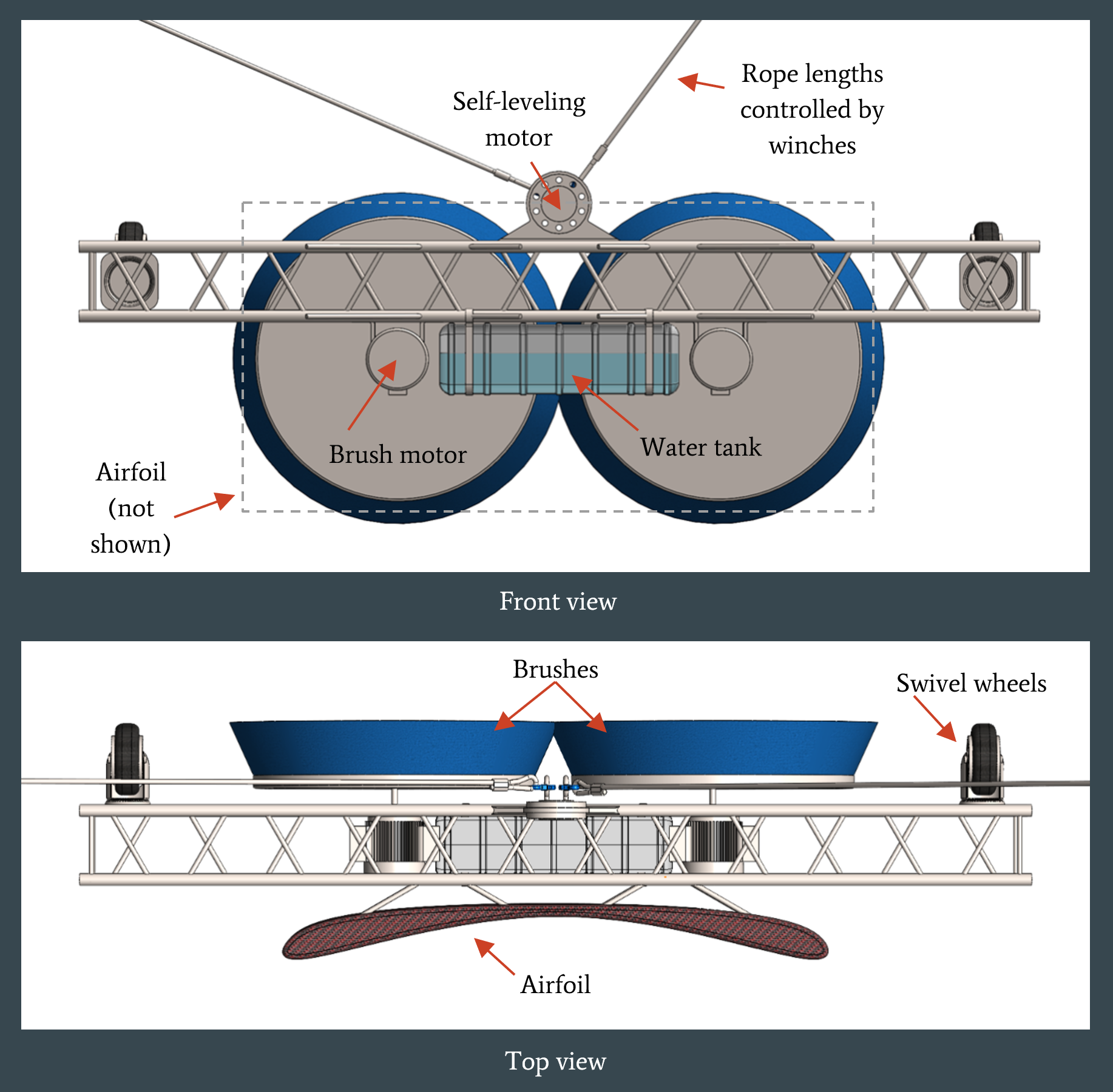
For our final project in the class Introduction to Robotics at Columbia, my group designed and simulated a window-cleaning robot that could be suspended and controlled via two cables mounted at the top of a skyscraper. The robot can be placed anywhere on the building by changing the lengths of the two cables, with an airfoil that creates pressure against the building. I designed the structure of the robot and created the CAD renderings and diagrams shown.